ARTEMIS: An Open-Source, Full-sized Humanoid Robot for Dynamic Locomotion
Abstract
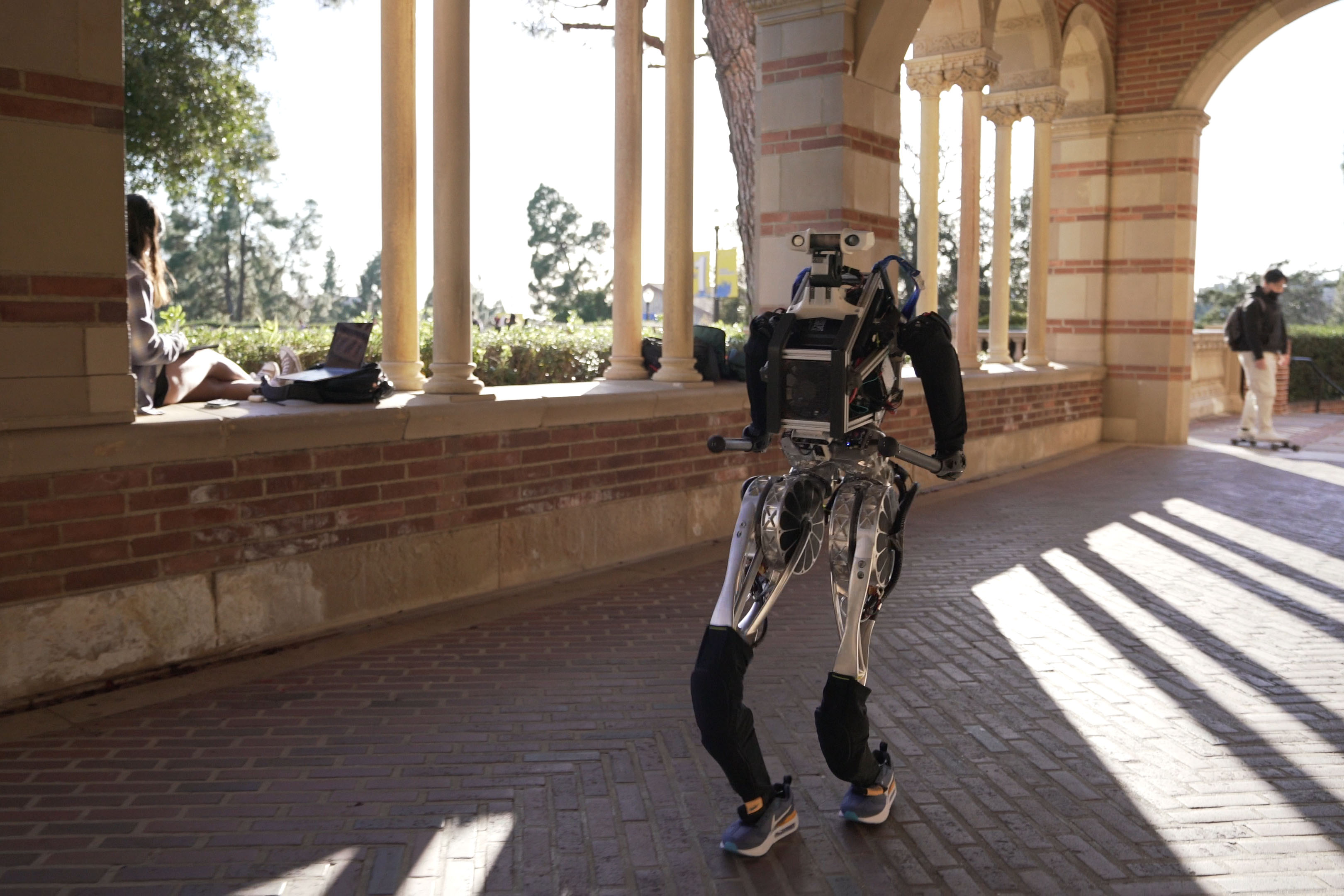
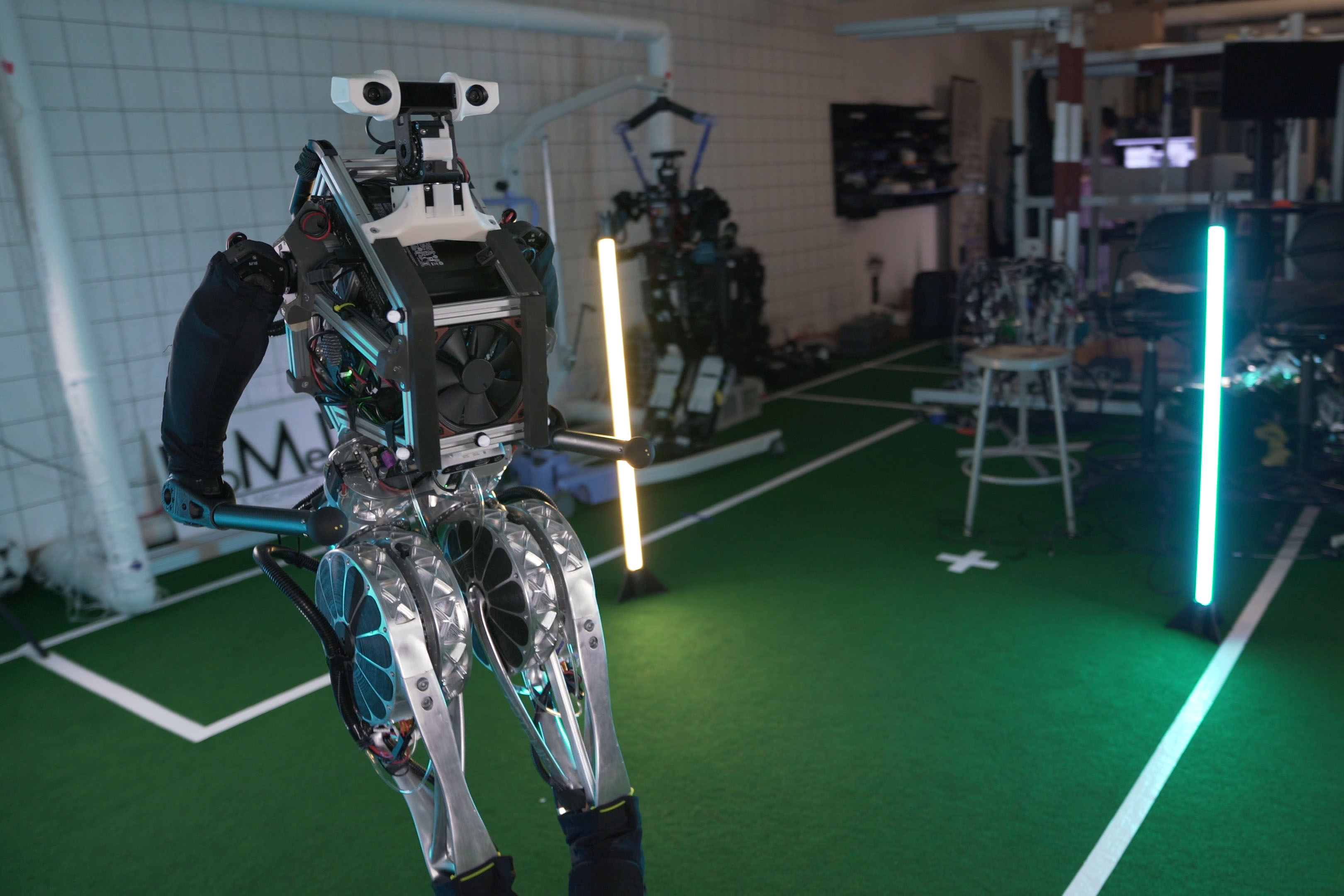
This paper presents ARTEMIS, an full-sized humanoid robot designed for dynamic motions. With 20 active degrees of freedom using custom proprioceptive actuators, ARTEMIS is capable of walking up to 2.1 m/s using a model-based control approach, making it one of the fastest humanoid robots at the time. It can also seamlessly transition between walking and running, making it the first platform entirely developed in academia to demonstrate such capabilities. This paper explains the details of the platform as well as the controller. ARTEMIS's performance and robustness are validated on various outdoor terrains as well as by winning a global robotics soccer competition. Having validated the platform, we open-source it to the wider community, starting from its actuation approach to the robot model with baseline controllers, to provide an accessible foundation for making custom humanoids.



RoboCup 2024 Finals
Behind the Scenes
Artemis Parts Machining
Artemis Repair Timelapse
One Small Step for Artemis
Getting there
We Don't Talk About This One...
What Artemis Sees When Jogging
BibTeX
@article{artemis2025,
title={ARTEMIS: An Open-Source, Full-sized Humanoid Robot for Dynamic Locomotion},
author={Taoyuanmin Zhu and Min Sung Ahn and Dennis Hong},
journal={IEEE Humanoids},
year={2025},
url={https://artemis.romela.org}
}